Newton: Disney, DeepMind, NVIDIA가 함께 만든 GPU 물리 시뮬레이션 엔진의 모든 것
로봇이 걷고, 물건을 잡고, 옷을 접는 법을 배우려면 — 현실을 시뮬레이션해야 한다. Newton은 Disney Research, Google DeepMind, NVIDIA가 Linux Foundation 아래 공동 개발한 GPU 가속 물리 엔진으로, MuJoCo 대비 최대 475배 빠른 시뮬레이션을 제공한다.
코어닷투데이2026-01-0330분
들어가며: 로봇에게 "걷는 법"을 가르치려면
로봇에게 걷는 법을 가르치는 가장 효과적인 방법은? 현실 세계에서 수만 번 넘어뜨려 보는 것이다. 하지만 현실의 로봇은 비싸고, 넘어지면 부서지고, 하루에 몇 번 시도하지 못한다.
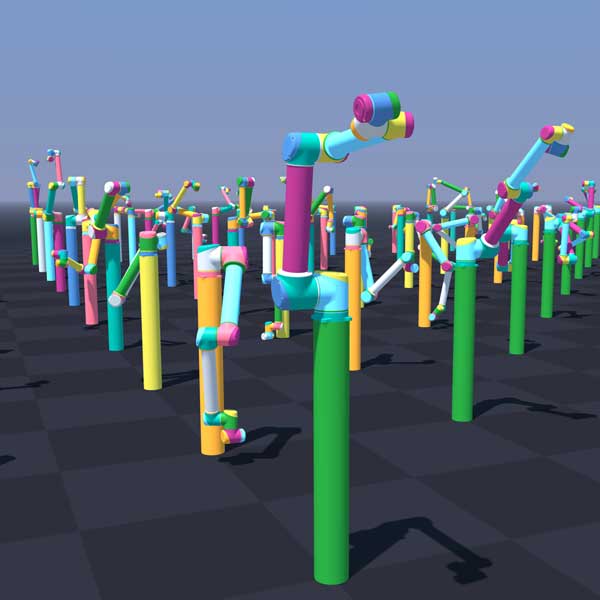
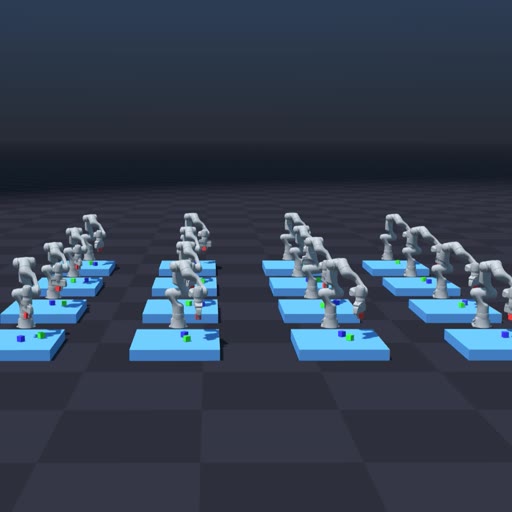
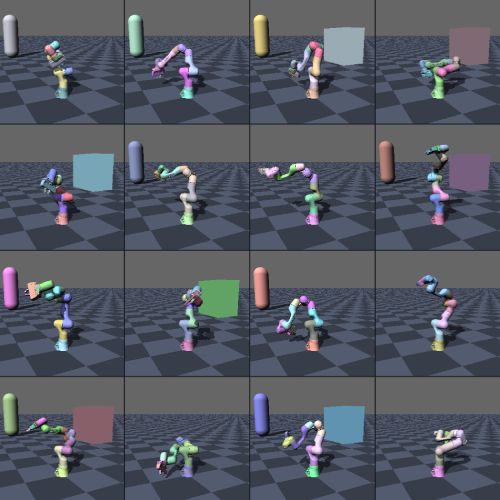
그래서 시뮬레이션이 필요하다. 가상 세계에서 로봇을 수백만 번 넘어뜨리고, 일어서게 하고, 다시 넘어뜨린다. GPU 수천 개가 병렬로 돌면서, 현실의 수만 년에 해당하는 경험을 몇 시간 안에 만들어낸다.
2025년 3월, NVIDIA GTC에서 이례적인 발표가 있었다. Disney Research, Google DeepMind, NVIDIA — 세 거대 기업이 Linux Foundation 아래에서 하나의 오픈소스 물리 엔진을 공동 개발한다는 것이었다.
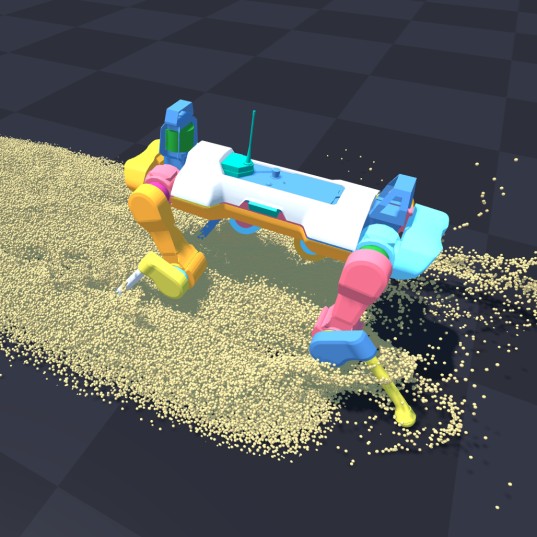
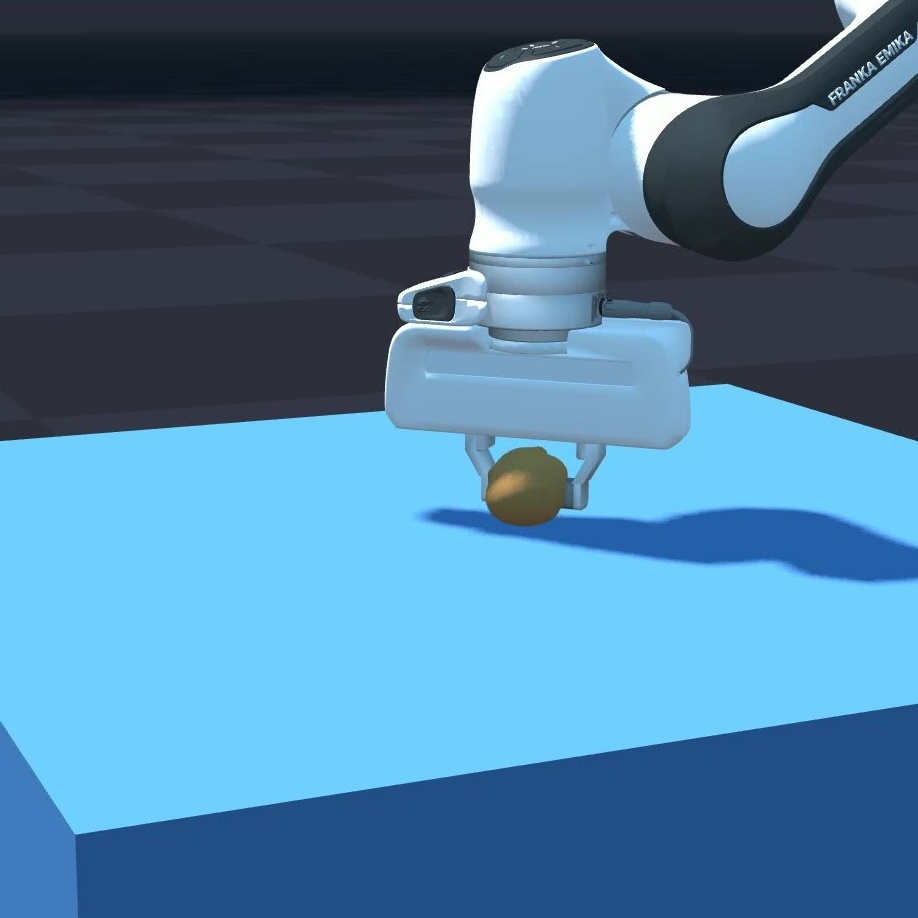
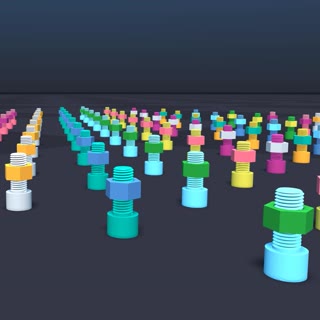
너트-볼트 조립, 커넥터 삽입 같은 접촉이 풍부한 조작(contact-rich manipulation)을 시뮬레이션하여 산업용 로봇의 조립 정책을 학습한다. Skild AI는 Newton으로 GPU 랙 조립을 자동화한다.
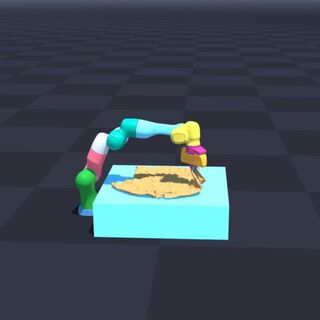
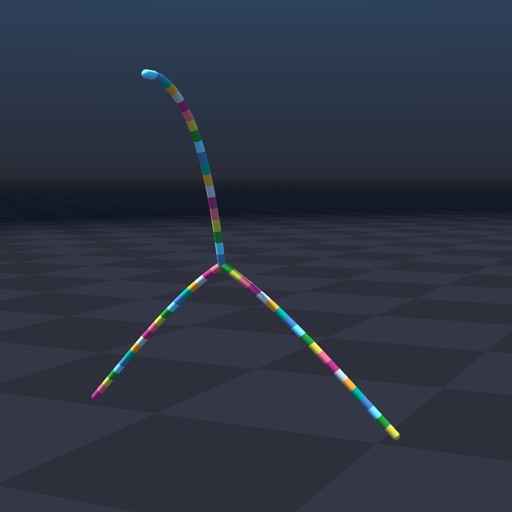
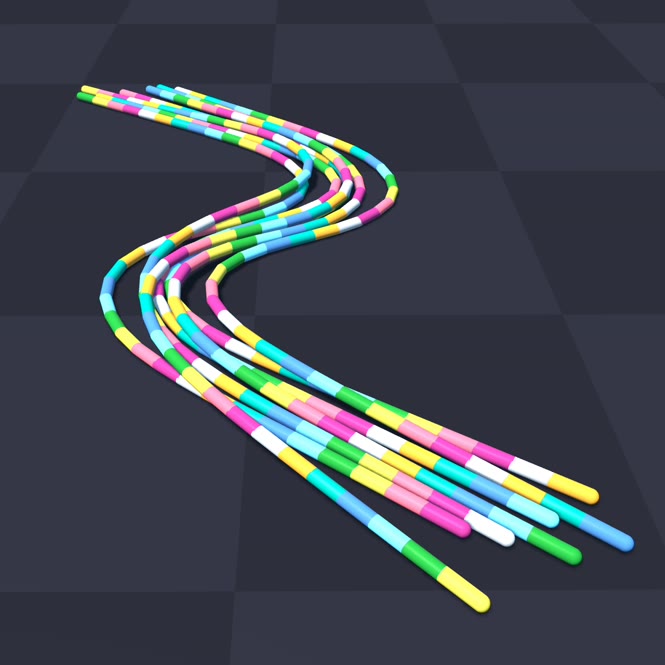
사례 3: 케이블 배선 자동화
Samsung과 Lightwheel는 Newton의 케이블 시뮬레이션으로 제조 현장의 케이블 배선 자동화를 연구한다. 케이블의 꼬임, 마찰, 히스테리시스를 정확히 시뮬레이션하는 것이 핵심이다.
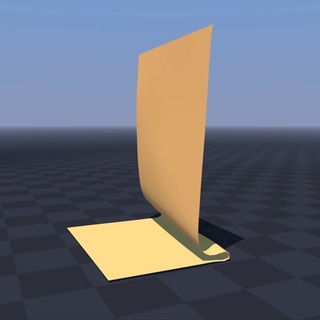
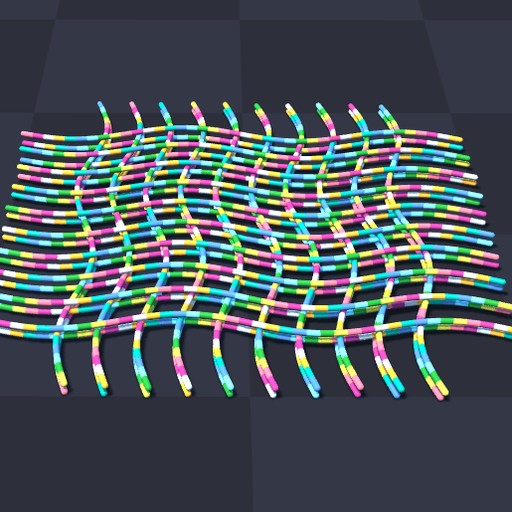
사례 4: 의복 시뮬레이션
Style3D는 Newton의 천 솔버로 의류 시뮬레이션을 수행한다. 의복이 몸에 맞는지, 움직임에 따라 어떻게 변하는지를 GPU에서 실시간으로 시뮬레이션한다.
사례 5: 엔터테인먼트 로봇
Disney는 Kamino 솔버로 테마파크의 BDX 드로이드 같은 애니매트로닉스 로봇을 시뮬레이션한다. 복잡한 폐쇄형 체인 메커니즘이 필요한 이유 — 관절이 서로 물리적으로 연결된 복잡한 로봇 구조를 정확히 모델링해야 하기 때문이다.
7. 기존 물리 엔진과의 비교
엔진
GPU 가속
멀티 피직스
미분 가능
오픈소스
거버넌스
MuJoCo
CPU 위주 (MJX로 일부 GPU)
제한적
부분적
✓ (Apache 2.0)
Google DeepMind
PyBullet
CPU
제한적
✗
✓
커뮤니티
Isaac Sim
GPU (PhysX)
✓
부분적
✗ (독점)
NVIDIA
Brax
GPU (JAX)
제한적
✓
✓
Google
Genesis
GPU
✓
✓
✓
학계
Newton
GPU (Warp)
✓ (가장 넓음)
✓
✓ (Apache 2.0)
Linux Foundation
Newton의 차별점:
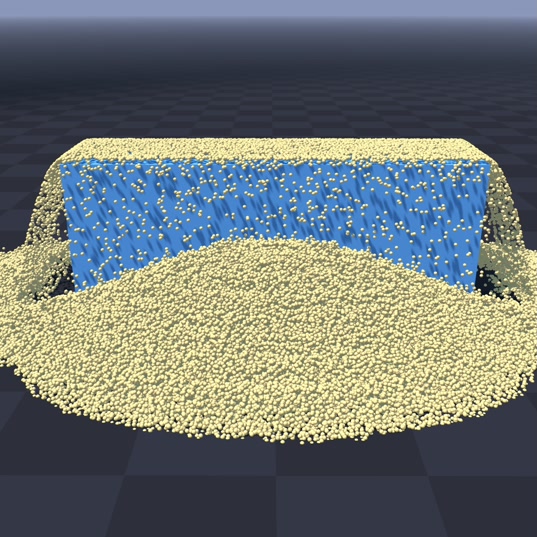
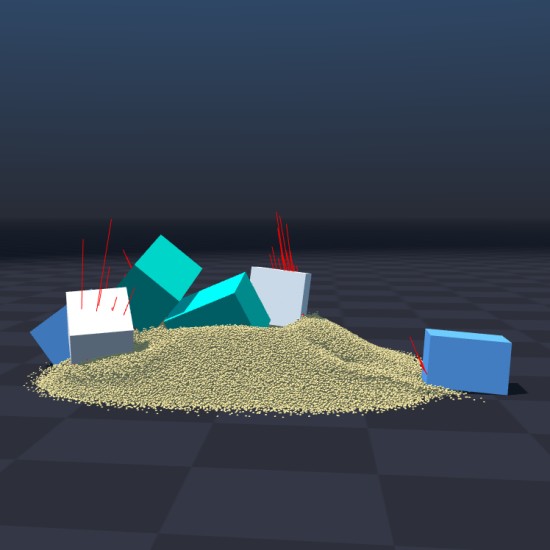
가장 넓은 멀티 피직스: 강체 + 천 + 케이블 + 입자 + 연체 + 양방향 커플링
Linux Foundation 거버넌스: 단일 기업 종속이 아닌 오픈 거버넌스
Isaac Sim/Lab 네이티브 통합: NVIDIA 로보틱스 생태계와 직접 연결
멀티 솔버: 동일 시뮬레이션에서 Kamino와 MJWarp를 필요에 따라 선택
8. 2026년 관점: 왜 Newton이 중요한가
Physical AI의 시대
2025~2026년, 로보틱스 업계의 핵심 키워드는 Physical AI다. LLM이 "언어를 이해하는 AI"라면, Physical AI는 "물리 세계를 이해하고 행동하는 AI"다.
Physical AI를 훈련시키려면 현실의 물리 법칙을 정확하게, 대규모로, 빠르게 시뮬레이션해야 한다. Newton은 이 요구에 정확히 맞는 인프라다.
개방형 표준의 힘
Newton이 Linux Foundation 프로젝트라는 것의 의미: 특정 기업에 종속되지 않는 오픈 표준이 될 가능성이 있다. MuJoCo가 Google의, PhysX가 NVIDIA의 엔진이었다면, Newton은 산업 전체의 공유 인프라를 지향한다.
Disney, Google, NVIDIA, Samsung, Toyota, 대학들이 모두 참여하는 거버넌스 — 이것은 물리 시뮬레이션의 "HTTP 표준화"에 비유할 수 있다.
시뮬레이션과 현실의 간극
Newton의 미분 가능 물리와 정밀한 접촉 시뮬레이션은 sim-to-real 간극(gap)을 줄이는 데 핵심적이다. 시뮬레이션에서 학습한 정책이 현실 로봇에서도 동일하게 작동하려면, 시뮬레이션의 물리적 정확도가 높아야 한다.
475배 빠른 속도도 중요하지만, "더 정확한 시뮬레이션"이 Newton의 진짜 가치다. 빠르지만 부정확한 시뮬레이션에서 학습한 로봇은 현실에서 넘어진다. Newton의 hydroelastic 접촉 모델, SDF 기반 충돌, 양방향 커플링은 모두 이 정확도를 높이기 위한 것이다.
GitHub 현황
항목
수치
GitHub Stars
2,981
Forks
320
기여자
30+
라이선스
Apache 2.0
최초 생성
2025년 4월
최신 업데이트
2026년 3월 19일 (오늘)
버전
v1.0.0 (GA)
마치며: 로봇이 세상을 배우는 가장 빠른 방법
Newton의 핵심 가치를 한 문장으로:
로봇이 현실 세계의 물리 법칙을 GPU에서 수백 배 빠르게 경험하고 학습할 수 있게 하는 오픈 인프라.
Disney의 애니매트로닉스, Google DeepMind의 강화학습, NVIDIA의 산업용 로보틱스 — 각각 다른 목적을 가진 세 거대 기업이 "물리 시뮬레이션은 공유 인프라가 되어야 한다"고 합의한 것은, 이 기술이 개별 기업의 경쟁 영역이 아니라 산업 전체의 기반이 되어야 한다는 인식의 반영이다.
pip install "newton-physics[examples]" 한 줄이면 시작할 수 있다. 2026년, 로봇에게 세상을 가르치는 도구가 모두에게 열려 있다.