TECH BLOG
기술 블로그
AI 기술 인사이트와 엔지니어링 경험을 공유합니다.
EDITOR'S PICK
에디터 추천
왜 PINN은 자꾸 실패할까 — Physics-informed Neural Networks 훈련 전문가 가이드
PINN의 아이디어보다 어려운 것은 훈련이다. 왜 학습이 자주 무너지는지, 2023년의 전문가 가이드 논문이 어떤 처방을 제안했는지, 그리고 2026년 현재 PINN이 어디에 남아 있는지를 사례와 함께 쉽게 풀어본다.
인간은 루프 안에서 지쳤다 — 'Human-in-the-Loop'의 70년史와, AI가 코딩의 보상을 훔쳐간 2026년
Pydantic의 엔지니어가 쓴 한 편의 고백 「The Human-in-the-Loop is Tired」가 개발자 세계를 뒤흔들었다. '코드가 알아서 써지는' 시대에 왜 우리는 더 생산적이면서 동시에 더 불행해졌을까? 이 글은 그 답을 찾기 위해 1948년 사이버네틱스의 '키잡이'에서 출발해, 군사 자율무기의 in/on/out-of-the-loop 논쟁, 강화학습의 보상함수, 스키너 상자, 그리고 2026년 버클리·하버드의 노동강도 연구까지 훑는다. '망가진 것은 당신이 아니라 피드백 루프'라는 명제를, 인터랙티브 시뮬레이터 2종과 함께 해부한다.

동료가 퇴사해도 그의 '판단'은 남는다: COLLEAGUE.SKILL과 사람을 증류하는 AI의 시대
팀의 베테랑이 떠나면 그의 코드리뷰 기준, 장애 대응 직감, 협업 방식도 함께 사라진다. 상하이 AI 연구소가 발표한 COLLEAGUE.SKILL은 이 '사람에 묶인 지식'을 흩어진 흔적에서 자동으로 증류해, 검사하고 고치고 되돌릴 수 있는 스킬 패키지로 만든다. GitHub 별 1.85만 개, 215개의 스킬. 사람을 복제하는 게 아니라 '편집 가능한 기술 아티팩트'로 만든다는 이 발상의 계보와 설계도를 원문 그림과 함께 풀어본다.
비행기 모는 퍼그가 'Nikon 정품 인증'을 받았다 — C2PA가 무너진 7가지 이유
2025년 9월, 한 사진가가 AI가 만든 가짜 사진에 Nikon의 'C2PA 정품 인증'을 받게 했다. 2026년 4월, UMBC·NSA·Hacker Factor 연구팀이 발표한 논문은 더 충격적이다 — C2PA 표준은 약속한 보안 목표를 단 하나도 달성하지 못한다. 디지털 사진이 거짓말을 시작한 100년의 역사부터, AI 시대 진짜를 증명하려는 마지막 시도의 균열까지.
ALL POSTS
모든 포스트
AWS 인프라 구성도 실무 가이드 (Part 5): 도구·시각 디자인·평가 — 구성도를 팀 표준으로 만들기
개인기로 그린 구성도는 그 사람이 나가면 끝난다. 2026년 기준 도구 9종 비교, 16:9 슬라이드 영역 배분과 글자 크기 하한, 범례·메타데이터 표준, /architecture 파일 구조와 ADR, 그리고 100점 평가표로 3부의 완성본을 실제 채점한다.
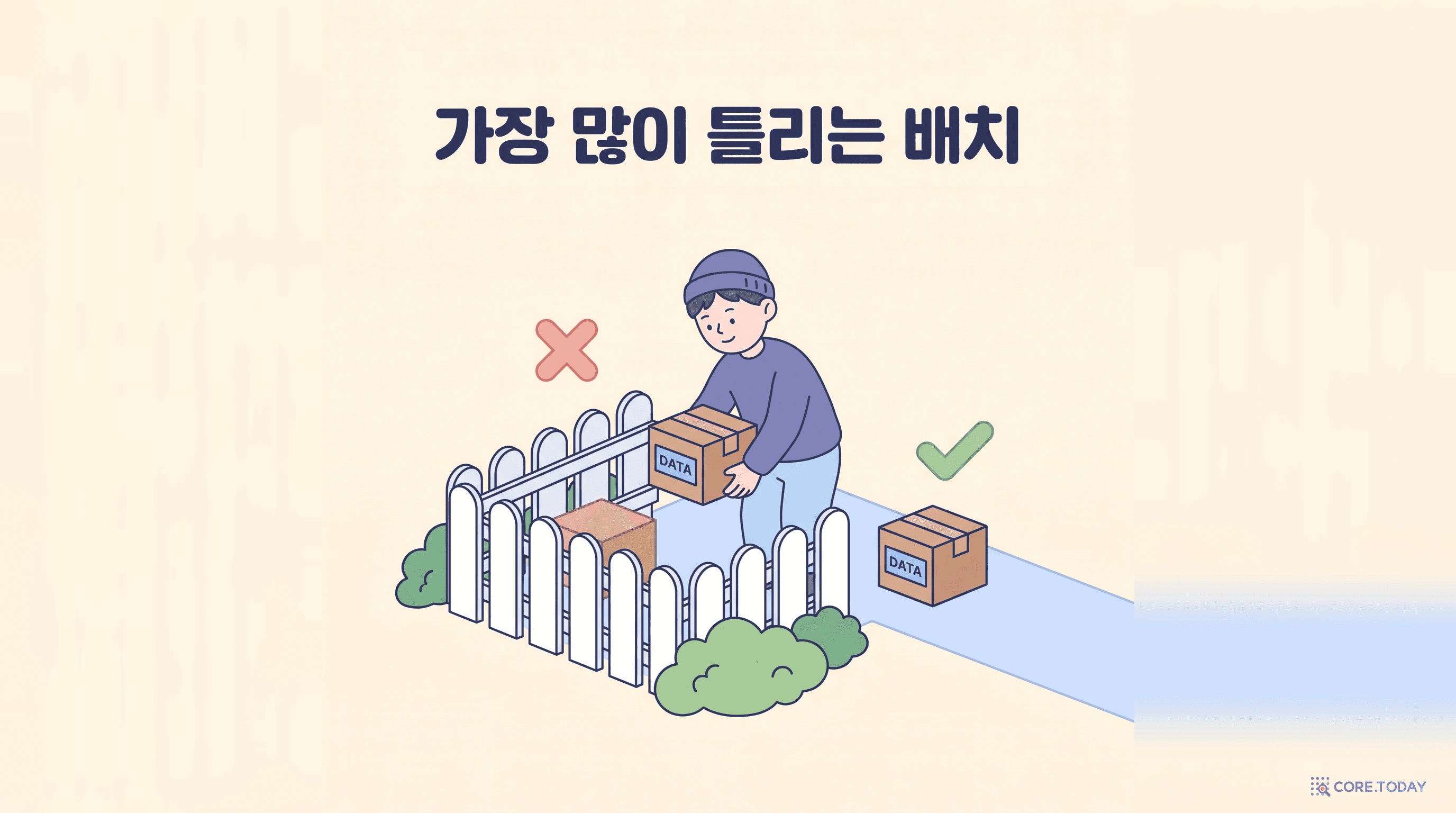
AWS 인프라 구성도 실무 가이드 (Part 4): AWS에서 가장 많이 틀리는 배치, 그리고 레퍼런스 읽는 법
S3 버킷은 서브넷 안에 없다. Lambda는 고객 VPC에서 실행되지 않는다. 그림이 읽히는 것과 맞는 것은 다른 문제다. 배치 오류 다섯 가지를 바로잡고, AWS 공식 레퍼런스 수십 장이 수렴하는 여섯 가지 레이아웃 패턴과 생성형 AI 수명주기 축까지 정리한다.
AWS 인프라 구성도 실무 가이드 (Part 3): draw.io를 열기 전에 — Architecture Brief와 7단계
툴을 먼저 열면 요구사항이 아니라 익숙한 AWS 서비스에 설계를 끼워 맞추게 된다. 그리기 전에 작성하는 Architecture Brief 16항목, 그리고 기능 블록에서 시작해 아이콘 감량으로 끝나는 7단계. 1부에서 예고한 '같은 사업, 다르게 그린 한 장'의 완성본이 여기서 나온다.
AWS 인프라 구성도 실무 가이드 (Part 2): 한 장 말고 여섯 장 — 제안서 구성도 세트 설계
종합 구성도 한 장으로 모든 독자를 만족시키려는 시도는 반드시 실패한다. 실패의 원인은 욕심이 아니라 줌 레벨이 섞였기 때문이다. C4 모델로 확대 수준을 정하고, arc42로 누락을 점검하고, 제안서에 들어갈 6장 세트를 설계한다.

AWS 인프라 구성도 실무 가이드 (Part 1): 왜 당신의 구성도는 '아이콘 수프'가 되는가
신입에게 draw.io를 열게 하면 100% 같은 일이 벌어진다. AWS 아이콘부터 깔아놓는다. 서비스 26개와 화살표 47개가 빽빽한 그 그림은 60초 테스트 7문항 중 단 하나도 답하지 못한다. 코어닷투데이가 신입에게 인프라 구성도를 가르치는 사내 표준을 5부작으로 공개한다.
데이터가 유일한 해자다 — AI 앱 시대, 무엇이 진짜 방어선인가
\"모델은 곧 상품이 된다. 그럼 우리에게 남는 건 뭔가?\" 2026년 모든 AI 회사가 마주한 질문에 대한 한 가지 답 — 데이터. 그런데 2019년 a16z는 '데이터 해자는 텅 빈 약속'이라고 못 박았다. 누가 맞는가? 구글의 클릭 로그와 아마존의 추천 엔진에서 시작해, 친칠라 논문이 데이터를 왕좌에 앉힌 순간, 인류의 텍스트가 바닥나는 2026~2032년, 그리고 RLVR이 바꾼 '어떤 데이터가 중요한가'라는 질문까지 추적한다. 핵심은 데이터의 '양'이 아니라 피드백 밀도 — 왜 코딩 에이전트는 이겼고 슬라이드 생성기는 지지부진했는지, 2×2 지도와 계산기로 직접 확인해 본다.
프롬프트 엔지니어링 실전 매뉴얼: 이 글 하나로 끝내는 68쪽 백서 완전 해설
구글이 낸 68쪽짜리 프롬프트 엔지니어링 백서를, 개념이 왜 생겼는지부터 오늘 당장 쓰는 법까지 풀어 정리했습니다. Temperature·Top-K·Top-P가 실제로 무슨 일을 하는지, 예시 하나가 왜 문장 열 줄보다 강한지, 프롬프트를 코드처럼 관리한다는 게 무슨 뜻인지 — 인터랙티브 실험실 4개와 함께 직접 만져보며 이해할 수 있게 만들었습니다.
ChatGPT는 어떻게 출처를 고르는가 — 네트워크 트래픽을 뜯어본 특집
한 연구자가 ChatGPT의 화면이 아니라 '네트워크 트래픽'을 열어봤다. 거기서 result_source, turn_use_case, fan-out 같은 내부 필드들이 튀어나왔다. AI가 무엇을 읽고, 무엇을 인용하고, 무엇을 아예 무시하는지 — 열 개의 파란 링크가 하나의 답변으로 접히는 시대에, '출처로 뽑히는 법'의 실제 작동 원리를 역사·논문·아키텍처까지 파고들어 쉽게 풀었다.
이해가 새로운 병목이다 — AI가 코드를 다 짜는 시대, 인간에게 남은 진짜 일
AI 에이전트가 코드를 초당 수백 줄씩 쏟아낸다. 생성은 공짜가 됐고, 검증도 점점 자동화된다. 그런데 병목 하나가 조용히 남았다 — 사람이 그걸 아직 이해하고 있는가? Geoffrey Litt의 2026년 7월 에세이 「Understanding is the new bottleneck」을 축으로, 왜 '이해'가 새로운 병목이 됐는지 파헤친다. 앨런 케이의 50년 전 꿈부터 페퍼트의 '매쓰랜드', 마투셰크의 간격 반복 퀴즈, 스토리 교수의 '인지 부채(cognitive debt)'까지 — 개념의 뿌리를 쉽게 따라가고, /explain-diff·마이크로월드·공유 공간이라는 세 가지 무기를 사례로 만난다. 마지막엔 독자가 직접 '이해 게이트'를 통과해 본다. '루프 밖으로 나가는 게 아니라, 더 깊이 루프 안으로.'